قام أحد أصدقاء عميل JSR مؤخرًا بتخصيص مشروع خزان ضغط لحام آلي. تختلف مواصفات قطع عمل العميل، وهناك العديد من الأجزاء التي يجب لحامها. عند تصميم حل متكامل آلي، من الضروري التأكد مما إذا كان العميل يستخدم اللحام التسلسلي أم اللحام النقطي، ثم يستخدم الروبوت بالكامل. خلال هذه الفترة، لاحظتُ شكوكًا لديه حول اختيار جهاز تحديد المواقع، لذا قدّمت JSR عرضًا موجزًا عنه للجميع.
موضع قلاب رأسي أحادي المحور ثنائي المحطة لرأس المقود وذيل المقود
موضع انعكاس عمودي ثلاثي المحاور VS
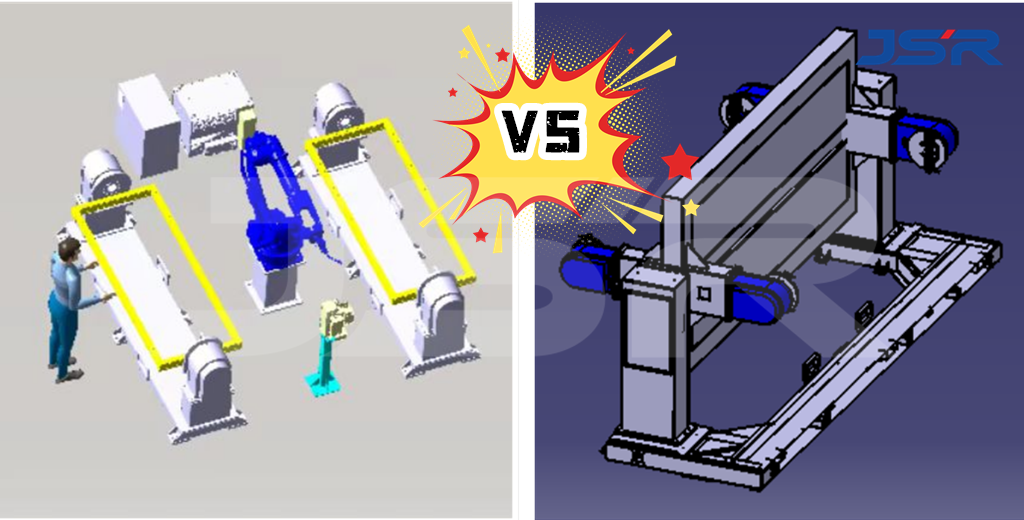
في محطة عمل اللحام الروبوتية، يعد موضع الانعكاس العمودي أحادي المحور في الرأس والذيل وموضع الانعكاس العمودي ثلاثي المحاور من معدات تحديد المواقع الشائعة، ولكل منهما مزاياه الخاصة في سيناريوهات التطبيق المختلفة.
وفيما يلي سيناريوهات تطبيقها والمقارنات الخاصة بها:
موضع إطار الرأس والذيل أحادي المحور ثنائي المحطة:
هذا النظام مناسب للحالات التي تتطلب تدوير قطعة العمل وتحديد موضعها أثناء عملية اللحام. على سبيل المثال، في خط إنتاج لحام هياكل السيارات، يمكن تركيب قطعتي عمل في محطتين في آنٍ واحد، ويتم تدويرهما وتحديد موضعهما باستخدام مُحدِّد رأس وذيل أحادي المحور، مما يُحسِّن كفاءة الإنتاج.
https://youtube.com/shorts/JPn-iKsRvj0
موضع انعكاس عمودي ثلاثي المحاور:
مثالي لحالات اللحام المعقدة التي تتطلب دوران وقلب قطع العمل في اتجاهات متعددة. على سبيل المثال، في صناعة الطيران، يلزم لحام هياكل الطائرات المعقدة. يتيح موضع القلاب الرأسي ثلاثي المحاور دوران وقلب قطعة العمل متعدد المحاور أفقيًا ورأسيًا لتلبية احتياجات اللحام بزوايا مختلفة.
https://youtu.be/v065VoPALf8
مقارنة المزايا:
موضع إطار الرأس والذيل أحادي المحور ثنائي المحطة:
- هيكل بسيط، سهل التشغيل والصيانة.
- يمكن معالجة قطعتي عمل في نفس الوقت لتحسين كفاءة الإنتاج.
- مناسب لبعض مهام اللحام البسيطة، مثل قطع العمل التي تتطلب محور دوران واحد.
- السعر أرخص من الموضع الرأسي ثلاثي المحاور.
- يتم التبديل بين المحطتين اليمنى واليسرى. عند اللحام في إحدى المحطتين، يتعين على العمال تحميل المواد وتفريغها على الجانب الآخر.
موضع انعكاس عمودي ثلاثي المحاور:
- يمكنه تحقيق الدوران والانعكاس متعدد المحاور وهو مناسب لمهام اللحام المعقدة.
- أثناء عملية اللحام بالروبوت، يحتاج العمال فقط إلى إكمال تحميل وتفريغ قطع العمل على جانب واحد.
- يوفر مزيدًا من مرونة ودقة التموضع، مما يمكنه تلبية متطلبات زوايا اللحام المختلفة.
- مناسب لقطع العمل ذات متطلبات جودة اللحام والدقة العالية.
باختصار، يعتمد اختيار الموضع المناسب على متطلبات مهمة اللحام المحددة، بما في ذلك عوامل مثل تعقيد قطعة العمل، وزاوية اللحام، وكفاءة الإنتاج، ومتطلبات جودة اللحام.
وقت النشر: ٢٠ فبراير ٢٠٢٤
